
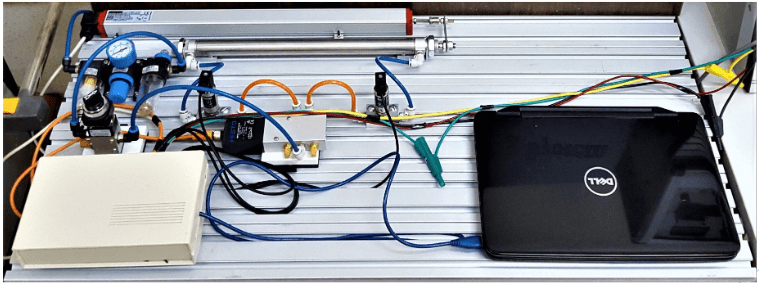
Controlling the position of the servopneumatic system despite the failure of the valve, leaking pipes, or stuck operator arm
The design of the sliding mode observer in order to increase the resistance against defects and failures and structural and non-structural uncertainties in the system.