Acquiring technical knowledge and localizing the mechanical part of the aerial starter test stand 02/10/2024
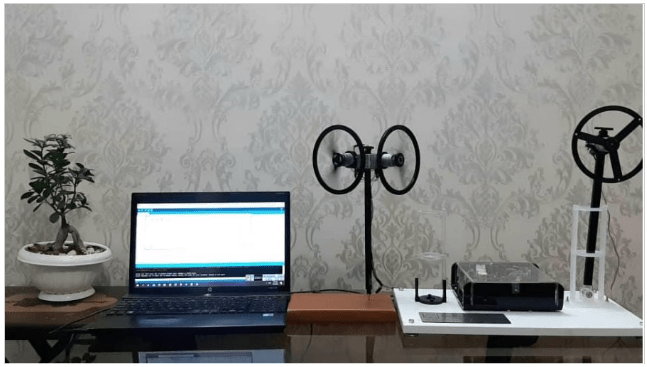
Design, construction and control of one-dimensional and two-dimensional pendulum wheel laboratory system 02/10/2024